
Voor deze opdracht maak je de code voor een robot lijnvolger in Python
We gebruiken de Mu editor in de BBC micro:bit mode.
Deze mode maakt het uploaden (flashen) en het importeren van libraries voor de Maqueen functies heel eenvoudig
Inleiding
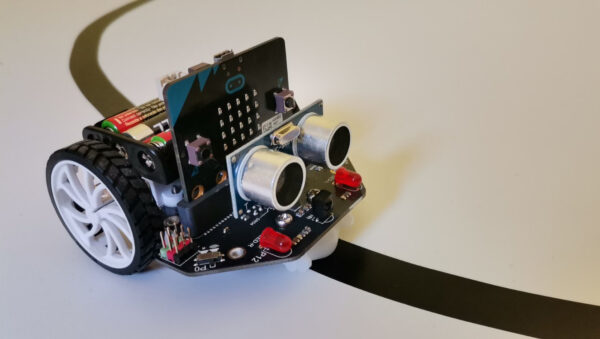
De Maqueen is een uitbreiding voor het micro:bit processor bordje.
De Maqueen heeft twee onafhankelijke motoren, een lijnsensor en een ultrasone afstands-sensor.
De Maqueen-library heeft alle benodigde functies voor de motoren en sensors in deze opdracht .
Jouw programma wordt geladen in de micro:bit.
Het is aan jou om de robot functies goed te gebruiken.
De Opdracht voor de lijnvolger vindt je hier.
Voor de uitbreiding met de obstakel-ontwijking gebruiken we de Ultrasone afstandsmeter.
Omdat deze regelmatig onbruikbare metingen geeft, is “filtering” van de meetwaardes nodig.
Daarvoor gaan we ook een programma maken.
Om het filter te testen is het handig een apart programma te maken.
Het Basisbestand , de Maqueen library en de Filter_US library vindt je hier.
Het testprogramma voor het filter vindt je hier