
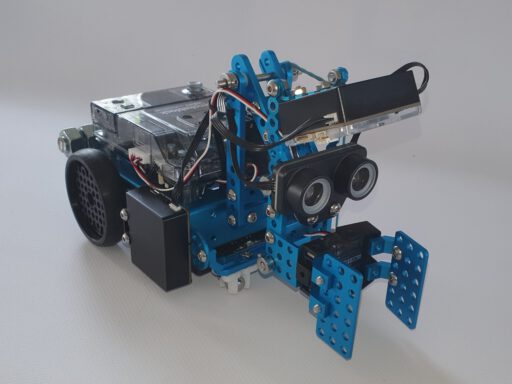
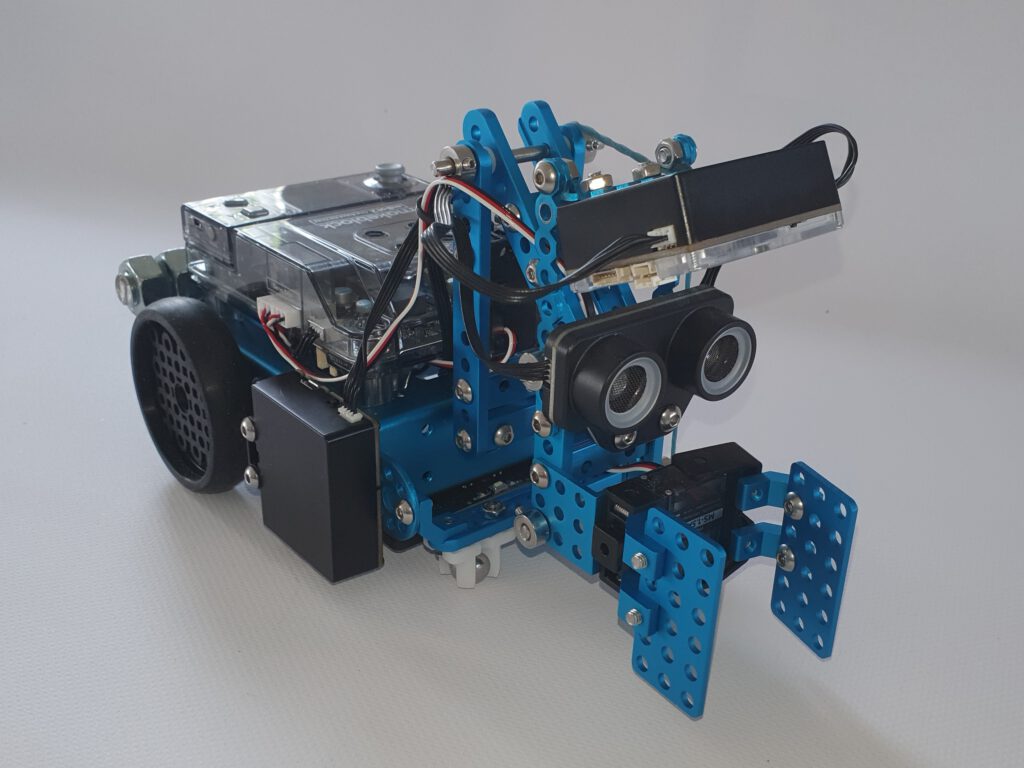
In deze opdracht gaan we de mBot_Neo met de slimme camera verkennen
De bedoeling is, dat we de robot en de camera zo programmeren, dat de robot zelfstandig een balletje kan pakken met behulp van de informatie van de camera.
Benodigdheden
- mBot_Neo
- Smart Camera (al gemonteerd)